अध्याय 13 दोलन
13.1 परिचय
हम अपने दैनिक जीवन में विभिन्न प्रकार की गतियों के संपर्क में आते हैं। आपने पहले से ही कुछ गतियों के बारे में सीखा है, जैसे कि सरल रेखीय गति और प्रक्षेप्य की गति। ये दोनों गतियाँ पुनरावृत्तिहीन होती हैं। हमने समान वृत्तीय गति और सौर मंडल में ग्रहों की कक्षीय गति के बारे में भी सीखा है। इन मामलों में, गति एक निश्चित समय अंतराल के बाद दोहराई जाती है, अर्थात् यह आवर्ती होती है। आपने बचपन में झूले में झूलना या झूले पर झूलना का आनंद लिया होगा। ये दोनों गतियाँ प्रकृति में पुनरावृत्त होती हैं, लेकिन ग्रह की आवर्ती गति से भिन्न होती हैं। यहाँ, वस्तु एक माध्य स्थिति के आगे-पीछे गति करती है। दीवार घड़ी के पेंडुलम की भी ऐसी ही गति होती है। इस प्रकार की आवर्ती आगे-पीछे गति के उदाहरण बहुतायत में हैं: नदी में नाव का ऊपर-नीचे हिलना, भाप इंजन में पिस्टन का आगे-पीछे जाना, आदि। इस प्रकार की गति को दोलन गति कहा जाता है। इस अध्याय में हम इस गति का अध्ययन करते हैं।
दोलन गति का अध्ययन भौतिकी की आधारभूत इकाई है; इसकी संकल्पनाओं की आवश्यकता कई भौतिक घटनाओं को समझने के लिए होती है। संगीत वाद्यों, जैसे सितार, गिटार या वायलिन में, हम कंपित तारों का सामना करते हैं जो मधुर ध्वनियाँ उत्पन्न करते हैं। ढोलक-तबले की पर्दियाँ और टेलीफोन तथा लाउडस्पीकर प्रणालियों की डायाफ्राम्स अपनी माध्य स्थितियों के आसपास आगे-पीछे कंपित होती हैं। वायु अणुओं की कम्पन ध्वनि के संचरण को संभव बनाती है। एक ठोस में परमाणु अपनी साम्यावस्था स्थितियों के आसपास कंपित होते हैं, कम्पन की औसत ऊर्जा तापमान के समानुपाती होती है। ए.सी. विद्युत आपूर्ति ऐसा वोल्टेज देती है जो माध्य मान (शून्य) के सापेक्ष धनात्मक और ऋणात्मक होते हुए बारी-बारी से दोलित होता है।
एक आवर्ती गति का, सामान्यतः, और दोलन गति का, विशेषतः, वर्णन कुछ मूलभूत संकल्पनाओं—आवर्त, आवृत्ति, विस्थापन, आयाम और कला—की आवश्यकता करता है। ये संकल्पनाएँ अगले खंड में विकसित की जाती हैं।
13.2 आवर्ती और दोलन गतियाँ
चित्र 13.1 कुछ आवर्ती गतियों को दर्शाता है। मान लीजिए कोई कीड़ा एक रैंप पर चढ़ता है और फिर नीचे गिर जाता है, वह वापस प्रारंभिक बिंदु पर आ जाता है और प्रक्रिया को समान रूप से दोहराता है। यदि आप इसकी जमीन से ऊँचाई का समय के साथ ग्राफ खींचें, तो वह कुछ चित्र 13.1 (a) जैसा दिखेगा। यदि कोई बच्चा एक सीढ़ी पर चढ़ता है, नीचे आता है, और प्रक्रिया को समान रूप से दोहराता है, तो उसकी जमीन से ऊँचाई चित्र 13.1 (b) जैसी दिखेगी। जब आप गेंद को जमीन से अपनी हथेली और जमीन के बीच उछालने का खेल खेलते हैं, तो उसकी ऊँचाई का समय के साथ ग्राफ चित्र 13.1 (c) जैसा दिखेगा। ध्यान दें कि चित्र 13.1 (c) में दोनों वक्र भाग न्यूटन के गति के समीकरण (अनुभाग 2.6 देखें) द्वारा दी गई परवलय के अनुभाग हैं,
नीचे की गति के लिए $h=u t+\frac{1}{2} g t^{2}$, और
ऊपर की गति के लिए $h=u t-\frac{1}{2} g t^{2}$,
प्रत्येक स्थिति में $u$ के भिन्न मानों के साथ। ये आवर्ती गति के उदाहरण हैं। इस प्रकार, एक गति जो समय के नियमित अंतरालों पर स्वयं को दोहराती है, आवर्ती गति कहलाती है।

चित्र 13.1 आवर्ती गति के उदाहरण। प्रत्येक स्थिति में दर्शाया गया आवर्तकाल T s।
बहुत बार, आवर्ती गति कर रहा शरीर अपने पथ के कहीं भीतर एक साम्यावस्था स्थिति रखता है। जब शरीर इस स्थिति पर होता है तो इस पर कोई निवल बाह्य बल कार्य नहीं करता। इसलिए, यदि इसे वहीं विश्राम पर छोड़ दिया जाए, तो यह वहीं सदा के लिए रहता है। यदि शरीर को इस स्थिति से थोड़ा विस्थापन दिया जाए, तो एक बल कार्य करने लगता है जो शरीर को पुनः साम्य बिंदु पर लाने का प्रयास करता है, जिससे दोलन या कम्पन उत्पन्न होते हैं। उदाहरण के लिए, एक कटोरे में रखी गेंद तली पर साम्यावस्था में होगी। यदि इसे बिंदु से थोड़ा विस्थापित किया जाए, तो यह कटोरे में दोलन करेगी। प्रत्येक दोलनकारी गति आवर्ती होती है, पर प्रत्येक आवर्ती गति दोलनकारी नहीं होती। वृत्तीय गति एक आवर्ती गति है, पर यह दोलनकारी नहीं है।
दोलन और कम्पन के बीच कोई उल्लेखनीय अंतर नहीं है। ऐसा प्रतीत होता है कि जब आवृत्ति कम होती है, तो हम इसे दोलन कहते हैं (जैसे, वृक्ष की शाखा का दोलन), जबकि जब आवृत्ति अधिक होती है, तो हम इसे कम्पन कहते हैं (जैसे, किसी संगीत वाद्य की तार का कम्पन)।
सरल आवर्त गति दोलनकारी गति का सरलतम रूप है। यह गति तब उत्पन्न होती है जब दोलन कर रहे शरीर पर लगने वाला बल इसके माध्य स्थिति से विस्थापन के समानुपाती होता है, जो कि साम्यावस्था स्थिति भी है। इसके अतिरिक्त, अपने दोलन के किसी भी बिंदु पर यह बल माध्य स्थिति की ओर निर्देशित होता है।
व्यवहार में, दोलन करते हुए पिण्ड घर्षण तथा अन्य विसर्जनकारी कारणों से उत्पन्न डैम्पिंग के कारण अन्ततः अपनी साम्यावस्था पर आकर विश्राम कर जाते हैं। तथापि, किसी बाह्य आवर्ती एजेंसी द्वारा उन्हें दोलनशील बनाए रखने के लिए बाध्य किया जा सकता है। हम इस अध्याय में आगे डैम्प्ड तथा बाध्य दोलनों की घटनाओं की चर्चा करेंगे।
कोई भी भौतिक माध्यम बड़ी संख्या में संयुक्त दोलकों के समूह के रूप में चित्रित किया जा सकता है। किसी माध्यम के अवयवों के सामूहिक दोलन स्वयं को तरंगों के रूप में प्रकट करते हैं। तरंगों के उदाहरणों में जल-तरंगें, भूकम्पीय तरंगें, विद्युतचुम्बकीय तरंगें सम्मिलित हैं। हम अगले अध्याय में तरंग-घटना का अध्ययन करेंगे।
13.2.1 आवर्तकाल तथा आवृत्ति
हमने देखा है कि कोई भी गति, जो समय के नियमित अन्तरालों पर स्वयं को दोहराती है, आवर्ती गति कहलाती है। समय का वह न्यूनतम अन्तराल जिसके पश्चात् गति पुनः दोहराई जाती है, उसका आवर्तकाल कहा जाता है। आइए आवर्तकाल को प्रतीक $T$ द्वारा निरूपित करें। इसका SI मात्रक सेकण्ड है। आवर्ती गतियों के लिए, जो सेकण्ड की स्केल पर बहुत तीव्र या बहुत मन्द होती हैं, समय के अन्य सुविधाजनक मात्रक प्रयुक्त किए जाते हैं। क्वार्ट्ज क्रिस्टल के कम्पनों का आवर्तकाल माइक्रोसेकण्ड $\left(10^{-6} \mathrm{~s}\right)$ में व्यक्त किया जाता है, जिसे $\mu \mathrm{s}$ संक्षिप्त रूप से लिखा जाता है। दूसरी ओर, ग्रह बुध की कक्षीय आवर्त 88 पृथ्वी-दिन है। हेली धूमकेतु प्रत्येक 76 वर्षों के बाद प्रकट होता है।
$T$ का व्युत्क्रम प्रति इकाई समय में होने वाली पुनरावृत्तियों की संख्या देता है। इस राशि को आवर्ती गति की आवृत्ति कहा जाता है। इसे प्रतीक $v$ द्वारा दर्शाया जाता है। $v$ और $T$ के बीच संबंध है
$$ \begin{equation*} v=1 / T \tag{13.1} \end{equation*} $$
इस प्रकार $v$ की इकाई $\mathrm{s}^{-1}$ है। रेडियो तरंगों के खोजकर्ता हेनरिच रुडोल्फ हर्ट्ज़ (1857-1894) के सम्मान में आवृत्ति की इकाई को एक विशेष नाम दिया गया है। इसे हर्ट्ज़ कहा जाता है (संक्षेप में $\mathrm{Hz}$)। इस प्रकार,
1 हर्ट्ज़ $=1 \mathrm{~Hz}=1$ प्रति सेकंड दोलन $=1 \mathrm{~s}^{-1}$
ध्यान दें कि आवृत्ति, $v$, आवश्यक रूप से एक पूर्णांक नहीं होती है।
उदाहरण 13.1 औसतन, एक मानव हृदय को एक मिनट में 75 बार धड़कते हुए पाया गया है। इसकी आवृत्ति और आवर्त काल की गणना कीजिए।
उत्तर हृदय की धड़कन आवृत्ति $=75 /(1 \mathrm{~min})$
$$ \begin{aligned} & =75 /(60 \mathrm{~s}) \\ & =1.25 \mathrm{~s}^{-1} \\ & =1.25 \mathrm{~Hz} \\ \text { आवर्त काल } T \quad & =1 /\left(1.25 \mathrm{~s}^{-1}\right) \\ & =0.8 \mathrm{~s} \end{aligned} $$
13.2.2 विस्थापन
अनुभाग 3.2 में हमने किसी कण का विस्थापन उसके स्थिति सदिश में परिवर्तन के रूप में परिभाषित किया था। इस अध्याय में हम विस्थापन शब्द का अधिक व्यापक अर्थ में प्रयोग करते हैं। यह किसी भी विचाराधीन भौतिक गुणधर्म में समय के साथ परिवर्तन को दर्शाता है। उदाहरण के लिए, किसी सतह पर एक स्टील की गेंद की सरल रेखीय गति में, प्रारंभिक बिंदु से दूरी समय के फलन के रूप में उसका स्थान विस्थापन है। मूल बिंदु का चयन सुविधा पर आधारित होता है। एक ब्लॉक को किसी स्प्रिंग से जोड़ा गया है, स्प्रिंग का दूसरा सिरा एक कठोर दीवार से जुड़ा है [देखें चित्र 13.2(a)]। सामान्यतः, शरीर का विस्थापन उसकी साम्यावस्था से मापना सुविधाजनक होता है। एक दोलनशील सरल लोलक के लिए, ऊर्ध्वाधर से कोण समय के फलन के रूप में विस्थापन चर माना जा सकता है [देखें चित्र 13.2(b)]। विस्थापन शब्द का प्रयोग हमेशा स्थिति के संदर्भ में ही नहीं होता। अनेक अन्य प्रकार के विस्थापन चर हो सकते हैं। किसी $\mathrm{AC}$ परिपथ में समय के साथ बदलता हुआ संधारित्र पर वोल्टेज भी एक विस्थापन चर है। इसी प्रकार, ध्वनि तरंग के प्रसार में समय के साथ दाब परिवर्तन, प्रकाश तरंग में बदलते विद्युत और चुंबकीय क्षेत्र विभिन्न संदर्भों में विस्थापन के उदाहरण हैं। विस्थापन चर धनात्मक और ऋणात्मक दोनों मान ले सकता है। दोलन प्रयोगों में विस्थापन को विभिन्न समयों के लिए मापा जाता है।

चित्र 13.2(a) एक ब्लॉक जो एक स्प्रिंग से जुड़ा है, जिसका दूसरा सिरा एक कठोर दीवार से स्थिर है। ब्लॉक घर्षणरहित सतह पर चलता है। ब्लॉक की गति को इसकी विस्थापन x, जो साम्यावस्था से दूरी है, के संदर्भ में वर्णित किया जा सकता है

चित्र 13.2(b) एक दोलनशील सरल लोलक; इसकी गति को ऊध्र्वाधर से कोणीय विस्थापन θ के संदर्भ में वर्णित किया जा सकता है।
विस्थापन को समय का एक गणितीय फलन द्वारा निरूपित किया जा सकता है। आवर्ती गति के मामले में, यह फलन समय में आवर्ती होता है। सबसे सरल आवर्ती फलनों में से एक निम्नलिखित द्वारा दिया जाता है
$$ \begin{equation*} f(t)=A \cos \omega t \tag{13.3a} \end{equation*} $$
यदि इस फलन का तर्क, $\omega t$, को $2 \pi$ रेडियन के पूर्णांक गुणज से बढ़ाया जाता है, तो फलन का मान अपरिवर्तित रहता है। फलन $f(t)$ तब आवर्ती होता है और इसकी आवर्ती, $T$, निम्नलिखित द्वारा दी जाती है
$$ \begin{equation*} T=\frac{2 \pi}{\omega} \tag{13.3b} \end{equation*} $$
इस प्रकार, फलन $f(t)$ आवर्ती है जिसकी आवर्ती $T$ है,
$$ f(t)=f(t+T) $$
स्पष्टतः यही परिणाम सही है यदि हम एक साइन फलन, $f(t)=A \sin \omega t$ पर विचार करें। आगे, साइन और कोसाइन फलनों का एक रैखिक संयोजन जैसे,
$$ \begin{equation*} f(t)=A \sin \omega t+B \cos \omega t \tag{13.3c} \end{equation*} $$
भी एक आवर्ती फलन है जिसकी वही आवर्तकाल $T$ है। लेते हुए,
$$ A=D \cos \phi \text { और } B=D \sin \phi $$
समी. (13.3c) को इस प्रकार लिखा जा सकता है,
$$ \begin{equation*} f(t)=D \sin (\omega t+\phi), \tag{13.3d} \end{equation*} $$
यहाँ $D$ और $\phi$ नियतांक हैं जो निम्नलिखित द्वारा दिए जाते हैं
$$ D=\sqrt{A^{2}+B^{2}} \text { और } \varphi=\tan ^{-1} \frac{B}{A} $$
आवर्ती साइन और कोसाइन फलनों की महान महत्ता एक उल्लेखनीय परिणाम के कारण है जिसे फ्रांसीसी गणितज्ञ, जीन बैप्टिस्ट जोसेफ फूरिये (1768-1830) ने सिद्ध किया: कोई भी आवर्ती फलन विभिन्न समय आवर्तों वाले साइन और कोसाइन फलनों के उपयुक्त गुणांकों के साएक एक संचयन के रूप में व्यक्त किया जा सकता है।
उदाहरण 13.2 निम्नलिखित में से कौन-से समय के फलन (a) आवर्ती और (b) अनावर्ती गति को निरूपित करते हैं? प्रत्येक आवर्ती गति के लिए आवर्तकाल बताइए [$\omega$ कोई धनात्मक नियतांक है]
(i) $\sin \omega t+\cos \omega t$
(ii) $\sin \omega t+\cos 2 \omega t+\sin 4 \omega t$
(iii) $\mathrm{e}^{-\omega t}$
(iv) $\log (\omega t)$
उत्तर
(i) $\sin \omega t+\cos \omega t$ एक आवर्ती फलन है, इसे $\sqrt{2} \sin (\omega t+\pi / 4)$ के रूप में भी लिखा जा सकता है।
अब $\sqrt{2} \sin (\omega t+\pi / 4)=\sqrt{2} \sin (\omega t+\pi / 4+2 \pi)$
$$=\sqrt{2} \sin [\omega(\mathrm{t}+2 \pi / \omega)+\pi / 4]$$
इस फलन का आवर्तकाल $2 \pi / \omega$ है।
(ii) यह एक आवर्ती गति का उदाहरण है। यह ध्यान दिया जा सकता है कि प्रत्येक पद एक भिन्न कोणीय आवृत्ति वाला आवर्ती फलन दर्शाता है। चूँकि आवर्तकाल वह न्यूनतम समय अंतराल है जिसके बाद एक फलन अपना मान दोहराता है, $\sin \omega t$ का आवर्तकाल $T_{0}=2 \pi / \omega$ है; $\cos 2 \omega t$ का आवर्तकाल $\pi / \omega=T_{0} / 2$ है; और $\sin 4 \omega t$ का आवर्तकाल $2 \pi / 4 \omega=T_{o} / 4$ है। पहले पद का आवर्तकाल अंतिम दो पदों के आवर्तकालों का गुणज है। इसलिए, वह न्यूनतम समय अंतराल जिसके बाद तीनों पदों का योग दोहराता है, $T_{0}$ है, और इस प्रकार, योग एक आवर्ती फलन है जिसका आवर्तकाल $2 \pi / \omega$ है।
(iii) फलन $e^{-\omega t}$ आवर्ती नहीं है, यह समय के साथ निरंतर घटता है और $t \rightarrow \infty$ पर शून्य की ओर प्रवृत्त होता है और इस प्रकार, यह कभी भी अपना मान दोहराता नहीं है।
(iv) फलन $\log (\omega t)$ समय $t$ के साथ निरंतर बढ़ता है। यह इसलिए कभी भी अपना मान दोहराता नहीं है और एक अनावर्ती फलन है। यह ध्यान दिया जा सकता है कि जैसे-जैसे $t \rightarrow \infty$, $\log (\omega t)$ अनंत की ओर विस्तरित होता है। यह इसलिए किसी भी प्रकार के भौतिक विस्थापन को दर्शा नहीं सकता है।
13.3 सरल आवर्त गति
एक कण को मान लीजिए जो किसी $x$-अक्ष के मूल बिन्दु के इर्द-गिर्द दो सीमाओं $+A$ और $-A$ के बीच आगे-पीछे दोलन कर रहा है, जैसा कि चित्र 13.3 में दिखाया गया है। इस दोलन गति को सरल आवर्त कहा जाता है यदि कण का मूल बिन्दु से विस्थापन $x$ समय के साथ इस प्रकार परिवर्तित होता है :
$$ \begin{equation*} x(t)=A \cos (\omega t+\phi) \tag{13.4} \end{equation*} $$

चित्र 13.3 x-अक्ष के मूल बिन्दु के इर्द-गिर्द एक कण जो सीमाओं +A और –A के बीच आगे-पीछे कंपन कर रहा है।
जहाँ $A$, $\omega$ और $\phi$ नियतांक हैं।
इस प्रकार, सरल आवर्त गति (SHM) कोई भी आवर्त गति नहीं है, बल्कि वह है जिसमें विस्थापन समय का साइनसoidal फलन होता है। चित्र 13.4 एक कण की उन स्थितियों को दर्शाता है जो SHM कर रहा है, समय के विविक्त मानों पर, प्रत्येक समय अंतराल $T / 4$ का है, जहाँ $T$ गति का आवर्तकाल है। चित्र 13.5 में $x$ बनाम $t$ का ग्राफ खींचा गया है, जो विस्थापन को समय का एक सतत फलन के रूप में देता है। वे राशियाँ $A$, $\omega$ और $\phi$ जो किसी दी गई SHM की विशेषता बताती हैं, मानक नामों से जानी जाती हैं, जैसा कि चित्र 13.6 में संक्षेप में दिया गया है। आइए इन राशियों को समझें।

चित्र 13.4 सरल आवर्त गति में कण की स्थिति विविक्त मानों t = 0, T/4, T/2, 3T/4, T, 5T/4 पर दिखाई गई है। गति जिस समय के बाद पुनः दोहराती है, वह T है। T स्थिर रहेगा, चाहे आप प्रारंभिक (t = 0) स्थिति कोई भी स्थान चुनें। विस्थापन शून्य होने पर (x = 0) चाल अधिकतम होती है और गति के चरम बिंदुओं पर शून्य होती है।
सरल आवर्त गति का आयाम A कण के अधिकतम विस्थापन का परिमाण है। [ध्यान दें, A को सकारात्मक माना जा सकता है बिना कोई सामान्यता खोए]

चित्र 13.5 सरल आवर्त गति के लिए समय का एक सतत फलन के रूप में विस्थापन।

चित्र 13.6 समीकरण (13.4) में मानक प्रतीकों का अर्थ
जैसे-जैसे समय का कोसाइन फलन +1 से -1 तक बदलता है, विस्थापन चरम मानों A और -A के बीच बदलता है। दो सरल आवर्त गतियाँ समान ω और φ रख सकती हैं, परंतु भिन्न आयाम A और B रख सकती हैं, जैसा कि चित्र 13.7 (a) में दिखाया गया है।

चित्र 13.7 (a) विस्थापन का समय के फलन के रूप में एक आरेख जो समीकरण (14.4) से φ = 0 लेकर प्राप्त किया गया है। वक्र 1 और 2 दो भिन्न आयामों A और B के लिए हैं।
जबकि आयाम A एक दिए गए सरल आवर्त गति (SHM) के लिए निश्चित होता है, कण की गति की अवस्था (स्थिति और वेग) किसी भी समय t पर कोज्या फलन में तर्क (ωt+φ) द्वारा निर्धारित होती है। यह समय-निर्भर राशि (ωt+φ) गति का कल (phase) कहलाती है। t = 0 पर कल का मान φ होता है और इसे कल नियतांक (या कल कोण) कहा जाता है। यदि आयाम ज्ञात हो, तो φ को t = 0 पर विस्थापन से निर्धारित किया जा सकता है। दो सरल आवर्त गतियों में समान A और ω हो सकते हैं, लेकिन भिन्न कल कोण φ हो सकता है, जैसा कि चित्र 13.7 (b) में दिखाया गया है।
अंत में, राशि ω गति के आवर्तकाल T से संबंधित होती है। सरलता के लिए समीकरण (13.4) में φ = 0 लेते हुए, हमें मिलता है

चित्र 13.7 (b) समीकरण (13.4) से प्राप्त एक आरेख। वक्र 3 और 4 क्रमशः φ = 0 और -π/4 के लिए हैं। दोनों आरेखों के लिए आयाम A समान है।
$$ \begin{equation*} x(t)=A \cos \omega t \tag{13.5} \end{equation*} $$
चूंकि गति का आवर्तकाल T है, x(t) का मान x(t+T) के बराबर होता है। अर्थात्,
$$ \begin{equation*} A \cos \omega t=A \cos \omega(t+T) \tag{13.6} \end{equation*} $$
अब कोसाइन फलन $2 \pi$ आवर्ती होता है, अर्थात् यह तब पुनः दोहराता है जब इसका कोण $2 \pi$ से बदलता है। इसलिए,
$$ \omega(t+T)=\omega t+2 \pi $$
$$ \text{अर्थात् } \quad \omega=2 \pi / T \tag{13.7}$$
$\omega$ को सरल आवर्त गति का कोणीय आवृत्ति कहा जाता है। इसका एस.आई. मात्रक रेडियन प्रति सेकंड है। चूँकि दोलन की आवृत्ति $1 / \mathrm{T}$ है, $\omega$ दोलन आवृत्ति का $2 \pi$ गुना होता है। दो सरल आवर्त गतियाँ समान $\mathrm{A}$ और $\phi$ रख सकती हैं, पर भिन्न $\omega$, जैसा कि आकृति 13.8 में दिखाया गया है। इस आरेख में वक्र (b) का आवर्त काल वक्र (a) से आधा तथा आवृत्ति दुगुनी है।

आकृति 13.8 समीकरण (13.4) के लिए φ = 0 के लिए दो भिन्न आवर्त कालों की आलेख।
उदाहरण 13.3 निम्नलिखित समय के फलनों में से कौन-से (a) सरल आवर्त गति तथा (b) आवर्ती पर सरल आवर्त नहीं दर्शाते हैं? प्रत्येक स्थिति के लिए आवर्त काल बताइए।
(1) $\sin \omega t-\cos \omega t$
(2) $\sin ^{2} \omega t$
उत्तर
(a) $\sin \omega t-\cos \omega t$
$$ \begin{aligned} &= \sin \omega t-\sin (\pi / 2-\omega t) \\ &= 2 \cos (\pi / 4) \sin (\omega t-\pi / 4) \\ &=\sqrt{ } 2 \sin (\omega t-\pi / 4) \end{aligned} $$
यह फलन एक सरल आवर्त गति को दर्शाता है जिसका आवर्त काल $T=2 \pi / \omega$ तथा प्रावस्था कोण $(-\pi / 4)$ या $(7 \pi / 4)$ है।
(b) $\sin ^{2} \omega t=1 / 2-1 / 2 \cos 2 \omega t$
यह फलन आवर्ती है, जिसकी आवर्ती अवधि $T=\pi / \omega$ है। यह एक सरल आवर्त गति को भी दर्शाता है, जिसका साम्य बिंदु शून्य के स्थान पर $1 / 2$ पर स्थित है।
13.4 सरल आवर्त गति और एकसमान वृत्तीय गति
इस खंड में हम दिखाते हैं कि एक वृत्त के व्यास पर एकसमान वृत्तीय गति का प्रक्षेप सरल आवर्त गति का अनुसरण करता है। एक सरल प्रयोग (चित्र 13.9) इस संबंध को देखने में हमारी सहायता करता है। एक गेंद को एक डोरी के सिरे से बाँधें और इसे किसी स्थिर बिंदु के चारों ओर क्षैतिज तल में नियत कोणीय चाल से घुमाएँ। गेंद तब क्षैतिज तल में एकसमान वृत्तीय गति करेगी। गेंद को बग़ल से या सामने से देखें, अपना ध्यान गति के तल में लगाए रखें। गेंद एक क्षैतिज रेखा के साथ-साथ आगे-पीछे गति करती प्रतीत होगी, जिसमें घूर्णन बिंदु मध्य बिंदु होगा। आप वैकल्पिक रूप से गेंद की छाया को उस दीवार पर देख सकते हैं जो वृत्त के तल के लंबवत् हो। इस प्रक्रिया में हम जो देख रहे हैं वह गेंद की गति है जो वृत्त के किसी व्यास पर है और यह देखने की दिशा के लंबवत् है।

चित्र 13.9 एक तल में गेंद की वृत्तीय गति, जिसे किनारे से देखा गया है, वह सरल आवर्त गति है।
आकृति 13.10 इस स्थिति को गणितीय रूप से वर्णित करती है। मान लीजिए एक कण $\mathrm{P}$ त्रिज्या $A$ वाले वृत्त पर कोणीय चाल $\omega$ से एकसमान गति से घूम रहा है। घूर्णन की दिशा वामावर्त है। कण का प्रारंभिक स्थिति सदिश, अर्थात् $t=0$ पर सदिश $\overline{\mathbf{O P}}$, $x$-अक्ष की धनात्मक दिशा से $\phi$ कोण बनाता है। समय $t$ में वह एक और कोण $\omega t$ तय करेगा और इसका स्थिति सदिश धनात्मक $x$-अक्ष से $\omega t+\phi$ कोण बनाएगा। अब, स्थिति सदिश OP का $x$-अक्ष पर प्रक्षेप विचारें। यह $\mathrm{OP}^{\prime}$ होगा। वृत्त पर कण $\mathrm{P}$ के घूमते समय $x$-अक्ष पर $\mathrm{P}^{\prime}$ की स्थिति इस प्रकार दी गई है

आकृति 13.10
$$ x(t)=A \cos (\omega t+\phi) $$
जो SHM का परिभाषित समीकरण है। यह दर्शाता है कि यदि $\mathrm{P}$ एक वृत्त पर एकसमान गति से घूमता है, तो वृत्त के व्यास पर इसका प्रक्षेप $\mathrm{P}^{\prime}$ SHM करता है। कण P और वह वृत्त जिस पर वह घूमता है, कभी-कभी क्रमशः संदर्भ कण और संदर्भ वृत्त कहलाते हैं।
हम $\mathrm{P}$ की गति का प्रक्षेप किसी भी व्यास, मान लीजिए $y$-अक्ष, पर ले सकते हैं। उस स्थिति में, $y$-अक्ष पर $\mathrm{P}^{\prime}$ का विस्थापन $y(t)$ इस प्रकार दिया गया है
$$ y=A \sin (\omega t+\phi) $$
जो कि $x$-अक्ष पर प्रक्षेप की तरह ही आयाम वाला एक सरल आवर्त गति है, परन्तु $\pi / 2$ के कलान्तर से भिन्न है।
इस वृत्तीय गति तथा सरल आवर्त गति के बीच इस सम्बन्ध के बावजूद, रेखीय सरल आवर्त गति में कण पर कार्यरत बल एकसमान वृत्तीय गति में कण को बनाए रखने के लिए आवश्यक केन्द्रापसारी बल से बहुत भिन्न होता है।
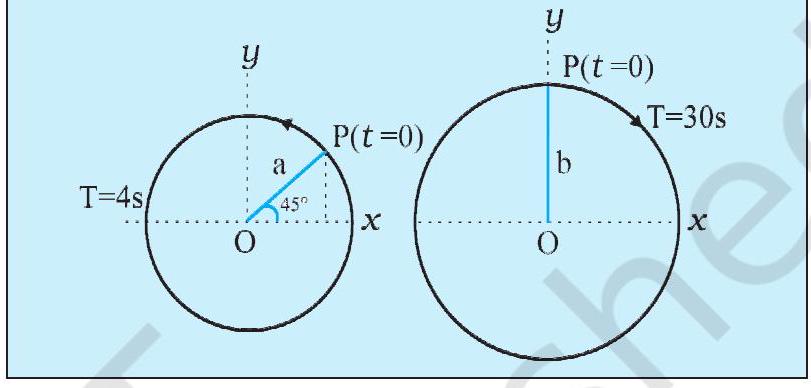
उदाहरण 13.4 नीचे दी गई आकृति दो वृत्तीय गतियों को दर्शाती है। वृत्त की त्रिज्या, परिक्रमा की अवधि, प्रारम्भिक स्थिति तथा घूर्णन की दिशा चित्रों में दर्शाई गई है। प्रत्येक स्थिति में घूर्णन कण $\mathrm{P}$ की त्रिज्या सदिश के $x$-प्रक्षेप की सरल आवर्त गति प्राप्त कीजिए।
उत्तर
(a) $t=0$ पर, OP धनात्मक $x$-अक्ष के साथ $45^{\circ}=\pi / 4 \mathrm{rad}$ का कोण बनाता है। समय $t$ के पश्चात् यह प्रतिदिश घूर्णन में $\frac{2 \pi}{T} t$ कोण तय करता है और $x$-अक्ष के साथ $\frac{2 \pi}{T} t+\frac{\pi}{4}$ कोण बनाता है।
समय $t$ पर OP का $x$-अक्ष पर प्रक्षेप इस प्रकार है,
$ x(t)=A \cos \frac{2 \pi}{T} t+\frac{\pi}{4} $
$T=4 \mathrm{~s}$ के लिए
$ x(t)=A \cos \frac{2 \pi}{4} t+\frac{\pi}{4} $
जो कि आयाम $A$, अवधि $4 \mathrm{~s}$ तथा प्रारम्भिक कलान्तर $*=\frac{\pi}{4}$ वाली एक सरल आवर्त गति है।
(b) इस स्थिति में $t=0$ पर, OP, $x$-अक्ष के साथ $90^{\circ}=\frac{\pi}{2}$ का कोण बनाता है। समय $t$ के बाद, यह घड़ी की दिशा में $\frac{2 \pi}{T} t$ का कोण तय करता है और $x$-अक्ष के साथ $\frac{\pi}{2}-\frac{2 \pi}{T} t$ का कोण बनाता है। समय $t$ पर OP का $x$-अक्ष पर प्रक्षेप इस प्रकार दिया गया है
$ \begin{array}{r} x(t)=B \cos \frac{\pi}{2}-\frac{2 \pi}{T} t \\ =B \sin \frac{2 \pi}{T} t \end{array} $
$T=30 \mathrm{~s}$ के लिए,
$$ x(t)=B \sin \left(\frac{\pi}{15} t\right) $$
इसे $x(t)=B \cos \frac{\pi}{15} t-\frac{\pi}{2}$ के रूप में लिखकर, और समी. (13.4) से तुलना करने पर, हम पाते हैं कि यह आयाम $B$, आवर्तकाल $30 \mathrm{~s}$, और प्रारंभिक प्रावस्था $-\frac{\pi}{2}$ के साथ एक सरल आवर्त गति को दर्शाता है।
कोण की प्राकृतिक इकाई रेडियन है, जिसे चाप तथा त्रिज्या के अनुपात के माध्यम से परिभाषित किया गया है। कोण एक विमाहीन राशि है। इसलिए जब हम π, इसके गुणज या अपवर्त्य प्रयोग करते हैं, तब हमेशा ‘रेडियन’ इकाई का उल्लेख करना आवश्यक नहीं होता। रेडियन और डिग्री के बीच रूपांतर मीटर और सेंटीमीटर या मील के बीच रूपांतर के समान नहीं है। यदि किसी त्रिकोणमितीय फलन का तर्क बिना इकाई के दिया गया है, तो यह समझा जाता है कि इकाई रेडियन है। दूसरी ओर, यदि कोण की इकाई के रूप में डिग्री प्रयोग करनी है, तो उसे स्पष्ट रूप से दिखाना होगा। उदाहरण के लिए, sin(150) का अर्थ 15 डिग्री का ज्या है, परंतु sin(15) का अर्थ 15 रेडियन का ज्या है। अब से, हम प्रायः इकाई के रूप में ‘rad’ नहीं लिखेंगे, और यह समझना चाहिए कि जब भी कोण को एक संख्यात्मक मान के रूप में, बिना इकाई के, उल्लेखित किया जाए, तो वह रेडियन में लिया जाएगा।
13.5 सरल आवर्त गति में वेग और त्वरण
समान वृत्तीय गति में किसी कण का वेग $v$ उसके कोणीय वेग $\omega$ तथा वृत्त की त्रिज्या $A$ का गुणनफल होता है।
$$ \begin{equation*} V=\omega A \tag{13.8} \end{equation*} $$
समय $t$ पर वेग $\overline{\mathbf{v}}$ की दिशा उस बिंदु पर वृत्त की स्पर्श रेखा के अनुदर होती है जहाँ उस क्षण कण स्थित है। चित्र 13.11 की ज्यामिति से यह स्पष्ट है कि समय $t$ पर प्रक्षेप कण $\mathrm{P}^{\prime}$ का वेग
$$ \begin{equation*} v(t)=-\omega A \sin (\omega t+\phi) \tag{13.9} \end{equation*} $$

चित्र 13.11 कण P′ का वेग, v (t), संदर्भ कण P के वेग v का प्रक्षेप है।
जहाँ ऋणात्मक चिह्न दर्शाता है कि $v(\mathrm{t})$ का दिशा धनात्मक $x$-अक्ष की दिशा के विपरीत है। समीकरण (13.9) एक कण का तात्कालिक वेग देता है जो सरल आवर्त गति कर रहा है, जहाँ विस्थापन समीकरण (13.4) द्वारा दिया गया है। हम निश्चय ही इस समीकरण को ज्यामितीय तर्क का उपयोग किए बिना, सीधे (समीकरण 13.4) को $t$ के सापेक्ष अवकलन करके प्राप्त कर सकते हैं:
$$ \begin{equation*} v(t)=\frac{\mathrm{d}}{\mathrm{d} t} x(t) \tag{13.10} \end{equation*} $$
संदर्भ वृत्त की विधि का उपयोग समान रूप से सरल आवर्त गति कर रहे कण का तात्कालिक त्वरण प्राप्त करने के लिए किया जा सकता है। हम जानते हैं कि एक कण $\mathrm{P}$ की समान वृत्तीय गति में केन्द्रापसारी त्वरण का परिमाण $v^{2} / \mathrm{A}$ या $\omega^{2} \mathrm{~A}$ है, और यह केंद्र की ओर निर्देशित होता है, अर्थात् दिशा PO के अनुदिश होती है। प्रक्षेप कण $\mathrm{P}^{\prime}$ का तात्कालिक त्वरण तब (देखें चित्र 13.12)
$$ \begin{align*} a(t) & =-\omega^{2} A \cos (\omega t+\phi) \ & =-\omega^{2} x(t) \tag{13.11} \end{align*} $$
अनुवादित हिंदी पाठ:
चित्र 13.12 कण P′ का त्वरण, a(t), संदर्भ कण P के त्वरण a का प्रक्षेपण है।
समीकरण (13.11) सरल आवर्त गति (SHM) में एक कण के त्वरण को देता है। इसी समीकरण को सीधे समीकरण (13.9) द्वारा दी गई वेग $v(t)$ का समय के सापेक्ष अवकलन करके भी प्राप्त किया जा सकता है:
$$ \begin{equation*} a(t)=\frac{\mathrm{d}}{\mathrm{d} t} v(t) \tag{13.12} \end{equation*} $$
हम समीकरण (13.11) से एक महत्वपूर्ण गुण देखते हैं कि सरल आवर्त गति में कण का त्वरण विस्थापन के समानुपाती होता है। यदि $\mathrm{x}(t)>0$ है, तो $a(t)<0$ होता है, और यदि $x(t)<0$ है, तो $a(t)>0$ होता है। इस प्रकार, $-A$ और $A$ के बीच $x$ का कोई भी मान हो, त्वरण $a(t)$ हमेशा केंद्र की ओर निर्देशित होता है।
सरलता के लिए, मान लें कि $\phi=0$ है और $x(t), v(t)$ और $a(t)$ के लिए व्यंजक लिखें:
$x(t)=A \cos \omega t, v(t)=-\omega A \sin \omega t, a(t)=-\omega^{2} A \cos \omega t$
इनसे संबंधित आलेख चित्र 13.13 में दिखाए गए हैं। सभी राशियाँ समय के साथ साइनसोइडली परिवर्तित होती हैं; केवल उनके अधिकतम मान भिन्न होते हैं और विभिन्न आलेखों में कला अंतर होता है। $x$, $-A$ से $A$ तक परिवर्तित होता है; $v(t)$, $-\omega A$ से $\omega A$ तक और $a(t)$, $-\omega^{2} A$ से $\omega^{2} A$ तक। विस्थापन आलेख के सापेक्ष, वेग आलेख में $\pi / 2$ का कला अंतर होता है और त्वरण आलेख में $\pi$ का कला अंतर होता है।

आकृति 13.13 सरल आवर्त गति में एक कण का विस्थापन, वेग और त्वरण एक ही आवर्तकाल T रखते हैं, परन्तु वे चरण में भिन्न होते हैं
उदाहरण 13.5 एक पिण्ड SI इकाइयों में समीकरण
$$ x=5 \cos [2 \pi t+\pi / 4] . $$
के अनुसार SHM के साथ दोलन करता है।
$t=1.5 \mathrm{~s}$ पर पिण्ड का (a) विस्थापन, (b) चाल और (c) त्वरण परिकलित कीजिए।
उत्तर पिण्ड का कोणीय आवृत्ति $\omega=2 \pi \mathrm{s}^{-1}$ और इसका आवर्तकाल $T=1 \mathrm{s}$ है।
$t=1.5 \mathrm{s}$ पर
(a) विस्थापन $=(5.0 \mathrm{~m}) \cos \left[\left(2 \pi \mathrm{s}^{-1}\right) \times\right.$ $1.5 \mathrm{s}+\pi / 4]$
$$ \begin{aligned} & =(5.0 \mathrm{~m}) \cos [(3 \pi+\pi / 4)] \\ & =-5.0 \times 0.707 \mathrm{~m} \\ & =-3.535 \mathrm{~m} \end{aligned} $$
(b) समीकरण (13.9) का प्रयोग करते हुए, पिण्ड की चाल
$=-(5.0 \mathrm{~m})\left(2 \pi \mathrm{s}^{-1}\right) \sin \left[\left(2 \pi \mathrm{s}^{-1}\right) \times 1.5 \mathrm{~s}\right.$ $+\pi / 4]$
$=-(5.0 \mathrm{~m})\left(2 \pi \mathrm{s}^{-1}\right) \sin [(3 \pi+\pi / 4)]$
$=10 \pi \times 0.707 \mathrm{~m} \mathrm{~s}^{-1}$
$=22 \mathrm{~m} \mathrm{~s}^{-1}$
(c) समीकरण (13.10) का प्रयोग करते हुए, पिण्ड का त्वरण
$ \begin{aligned} & =-\left(2 \pi \mathrm{s}^{-1}\right)^{2} \times \text { विस्थापन } \ & =-\left(2 \pi \mathrm{s}^{-1}\right)^{2} \times(-3.535 \mathrm{~m}) \ & =130 \mathrm{~m} \mathrm{~s}^{-2} \end{aligned} $
13.6 सरल आवर्त गति के लिए बल नियम
न्यूटन के गति के द्वितीय नियम और एक कण के लिए त्वरण के सूत्र का उपयोग करते हुए जो सरल आवर्त गति कर रहा है (समी. 13.11), सरल आवर्त गति में द्रव्यमान $m$ के कण पर कार्य करने वाला बल
$$ \begin{align*} F(t) & =m a \ & =-m \omega^{2} x(t) \end{align*} $$
$$ \text{अर्थात्} \quad F(t)=-k x(t) \tag{13.13}$$
$$ \text{जहाँ} \quad k=m \omega^{2} \tag{13.14a}$$
$$ \text{या} \quad \omega=\sqrt{\frac{k}{m}} \tag{13.14b}$$
त्वरण की तरह, बल भी सदैव माध्य स्थिति की ओर निर्देशित होता है—इसलिए इसे कभी-कभी सरल आवर्त गति में पुनर्स्थापन बल कहा जाता है। अब तक की चर्चा का सारांश यह है कि सरल आवर्त गति को दो समतुल्य तरीकों से परिभाषित किया जा सकता है, या तो विस्थापन के लिए समी. (13.4) से या बल नियम देने वाली समी. (13.13) से। समी. (13.4) से समी. (13.13) तक जाने के लिए हमें दो बार अवकलन करना पड़ा। इसी प्रकार, बल नियम समी. (13.13) को दो बार समाकलन करके हम समी. (13.4) पर वापस पहुँच सकते हैं।
ध्यान दें कि समी. (13.13) में बल $x(t)$ के साथ रैखिक रूप से आनुपातिक है। ऐसे बल के अधीन दोलन करता कण, इसलिए, एक रैखिक आवर्त दोलक कहलाता है। वास्तविक दुनिया में, बल में $x^{2}, x^{3}$ आदि के समानुपाती छोटे अतिरिक्त पद हो सकते हैं। इन्हें तब अरैखिक दोलक कहा जाता है।
उदाहरण 13.6 वसंत नियतांक $k$ की दो समान स्प्रिंगें एक द्रव्यमान $m$ के ब्लॉक और स्थिर सहारों से जुड़ी हैं जैसा कि चित्र 13.14 में दिखाया गया है। दिखाइए कि जब द्रव्यमान को अपनी साम्यावस्था से किसी भी ओर विस्थापित किया जाता है, तो यह सरल आवर्त गति करता है। दोलन की आवर्त अवधि ज्ञात कीजिए।

चित्र 13.14
उत्तर मान लीजिए द्रव्यमान को साम्यावस्था से थोड़ी दूरी $x$ दाईं ओर विस्थापित किया गया है, जैसा कि चित्र 13.15 में दिखाया गया है। इस स्थिति में बाईं ओर की स्प्रिंग लंबाई $x$ तक खिंच जाती है और दाईं ओर की स्प्रिंग समान लंबाई तक संकुचित हो जाती है। द्रव्यमान पर कार्यरत बल तब हैं,

चित्र 13.15
$F _{1}=-k x$ (बाईं ओर की स्प्रिंग द्वारा लगाया गया बल, द्रव्यमान को माध्य स्थिति की ओर खींचने का प्रयास करता है)
$F _{2}=-k x$ (दाईं ओर की स्प्रिंग द्वारा लगाया गया बल, द्रव्यमान को माध्य स्थिति की ओर धकेलने का प्रयास करता है)
द्रव्यमान पर कार्यरत कुल बल, $F$, तब दिया गया है,
$ F=-2 k x $
इसलिए द्रव्यमान पर कार्य करने वाला बल विस्थापन के समानुपाती है और माध्य स्थिति की ओर निर्देशित है; अतः द्रव्यमान द्वारा किया गया गति सरल आवर्त है। दोलनों का आवर्तकाल,
$ T=2 \pi \sqrt{\frac{m}{2 k}} $
13.7 सरल आवर्त गति में ऊर्जा
एक कण की सरल आवर्त गति में गतिज और स्थितिज ऊर्जाएँ शून्य और उनके अधिकतम मानों के बीच परिवर्तित होती हैं।
अनुभाग 13.5 में हमने देखा है कि एक कण, जो सरल आवर्त गति करता है, का वेग समय का एक आवर्ती फलन होता है। यह विस्थापन की चरम स्थितियों पर शून्य होता है। इसलिए ऐसे कण की गतिज ऊर्जा (K), जिसे इस प्रकार परिभाषित किया गया है
$ \begin{align*} K & =\frac{1}{2} m v^{2} \end{align*} $
$ \begin{align*} & =\frac{1}{2} m \omega^{2} A^{2} \sin ^{2}(\omega t+\phi) \end{align*} $
$ \begin{align*} & =\frac{1}{2} k A^{2} \sin ^{2}(\omega t+\phi) \tag{13.15} \end{align*} $
समय का एक आवर्ती फलन भी है, जो विस्थापन अधिकतम होने पर शून्य होती है और कण माध्य स्थिति पर होने पर अधिकतम होती है। ध्यान दें, चूँकि K में v का चिह्न महत्त्वहीन है, K का आवर्तकाल T/2 है।
एक कण, जो सरल आवर्त गति करता है, की स्थितिज ऊर्जा (U) क्या है? अध्याय 6 में हमने देखा है कि स्थितिज ऊर्जा की संकल्पना केवल संरक्षी बलों के लिए ही संभव है। स्प्रिंग बल F=-k x एक संरक्षी बल है, जिससे संबद्ध स्थितिज ऊर्जा
$$ \begin{equation*} U=\frac{1}{2} k x^{2} \tag{13.16} \end{equation*} $$
इस प्रकार, एक कण जो सरल आवर्त गति कर रहा है, उसकी स्थितिज ऊर्जा है,
$ \begin{align*} & U(x)=\frac{1}{2} k x^{2} \end{align*} $
$ \begin{align*} & =\frac{1}{2} k A^{2} \cos ^{2}(\omega t+\phi) \tag{13.17} \end{align*} $
इसलिए, एक कण जो सरल आवर्त गति कर रहा है, उसकी स्थितिज ऊर्जा भी आवर्ती होती है, जिसका आवर्तकाल $T / 2$ होता है, माध्य स्थिति पर यह शून्य होती है और चरम विस्थापन पर अधिकतम।
समीकरणों (13.15) और (13.17) से यह स्पष्ट होता है कि तंत्र की कुल ऊर्जा, $E$, है,
$ E=U+K $
$ \begin{aligned} & =\frac{1}{2} k A^{2} \cos ^{2}(\omega t+\phi)+\frac{1}{2} k A^{2} \sin ^{2}(\omega t+\phi) \\ & =\frac{1}{2} k A^{2}\left[\cos ^{2}(\omega t+\phi)+\sin ^{2}(\omega t+\phi)\right] \end{aligned} $
प्रचलित त्रिकोणमितीय सर्वसमिका का उपयोग करने पर, कोष्ठक में व्यंजक का मान एक होता है। इस प्रकार,
$$ \begin{equation*} E=\frac{1}{2} k A^{2} \tag{13.18} \end{equation*} $$
इस प्रकार, एक आवर्त दोलक की यांत्रिक कुल ऊर्जा समय से स्वतंत्र होती है, जैसा कि किसी भी संरक्षी बल के अंतर्गत गति के लिए अपेक्षित होता है। एक रैखिक सरल आवर्त दोलक की स्थितिज और गतिज ऊर्जाओं का समय और विस्थापन पर निर्भर व्यवहार चित्र 13.16 में दर्शाया गया है।

आकृति 13.16 एक कण की सरल आवर्त गति (SHM) में गतिज ऊर्जा, स्थितिज ऊर्जा और कुल ऊर्जा को समय के साथ [(a) में दिखाया गया है] और विस्थापन के साथ [(b) में दिखाया गया है] प्रदर्शित करता है। गतिज ऊर्जा और स्थितिज ऊर्जा दोनों T/2 अवधि के बाद दोहराती हैं। कुल ऊर्जा सभी t या x पर स्थिर रहती है।
ध्यान दें कि आकृति 13.16 में सरल आवर्त गति में गतिज ऊर्जा और स्थितिज ऊर्जा दोनों को सदैव धनात्मक देखा गया है। गतिज ऊर्जा कभी भी ऋणात्मक नहीं हो सकती, क्योंकि यह वेग के वर्ग के समानुपाती होती है। स्थितिज ऊर्जा धनात्मक होती है क्योंकि स्थितिज ऊर्जा में अनिर्धारित नियतांक को धनात्मक चुना गया है। गतिज ऊर्जा और स्थितिज ऊर्जा दोनों SHM के प्रत्येक आवर्त के दौरान दो बार शिखर पर पहुँचती हैं। जब x=0 होता है, तो ऊर्जा गतिज होती है; चरम बिंदुओं x= ±A पर, यह पूरी तरह स्थितिज ऊर्जा होती है। इन सीमाओं के बीच गति के दौरान, गतिज ऊर्जा स्थितिज ऊर्जा के खाते में बढ़ती है या इसका विपरीत होता है।
उदाहरण 13.7 एक ब्लॉक जिसका द्रव्यमान 1 kg है, एक स्प्रिंग से जुड़ा हुआ है। स्प्रिंग का स्प्रिंग नियतांक 50 N m⁻¹ है। ब्लॉक को x=0 पर इसके साम्यावस्था से 10 cm दूरी तक घर्षणहीन सतह पर t=0 पर विराम से खींचा जाता है। ब्लॉक की गतिज, स्थितिज और कुल ऊर्जाओं की गणना कीजिए जब वह माध्य स्थिति से 5 cm दूर होता है।
उत्तर
ब्लॉक SHM करता है, इसका कोणीय आवृत्ति, समीकरण (13.14b) द्वारा दी गई है,
$ \begin{aligned} \omega & =\sqrt{k / m} \\ & =\sqrt{\frac{50 \mathrm{~N} \mathrm{~m}}{1 \mathrm{~kg}}}\\ \\ & =7.07 \mathrm{rad} \mathrm{s}^{-1} \text { }\\ \end{aligned} $
किसी भी समय $t$ इसका विस्थापन निम्न द्वारा दिया जाता है,
$$ x(t)=0.1 \cos (7.07 t) $$
इसलिए, जब कण माध्य स्थिति से $5 \mathrm{~cm}$ दूर है, तब हमें मिलता है
$$ 0.05=0.1 \cos (7.07 t) $$
अथवा $\cos (7.07 t)=0.5$ और इसलिए
$\sin (7.07 t)=\frac{\sqrt{3}}{2}=0.866$
तब, $x=5 \mathrm{~cm}$ पर गुटके का वेग है
$$ \begin{aligned} & =0.1 \times 7.070 .866 \mathrm{~m} \mathrm{~s}^{-1} \\ & =0.61 \mathrm{~m} \mathrm{~s}^{-1} \end{aligned} $$
इसलिए गुटके की गतिज ऊर्जा,
$$ \begin{aligned} & =\frac{1}{2} m v^{2} \\ & =1 / 2\left[1 \mathrm{~kg} \times\left(0.6123 \mathrm{~m} \mathrm{~s}^{-1}\right)^{2}\right] \\ & =0.19 \mathrm{~J} \end{aligned} $$
गुटके की स्थितिज ऊर्जा,
$$ \begin{aligned} & =\frac{1}{2} k x^{2} \\ & =1 / 2\left(50 \mathrm{~N} \mathrm{~m}^{-1} \times 0.05 \mathrm{~m} \times 0.05 \mathrm{~m}\right) \\ & =0.0625 \mathrm{~J} \end{aligned} $$
$x=5 \mathrm{~cm}$ पर गुटके की कुल ऊर्जा,
$$ =\text { गतिज ऊर्जा + स्थितिज ऊर्जा } $$ $$ =0.25 \mathrm{~J} $$
हम यह भी जानते हैं कि अधिकतम विस्थापन पर गतिज ऊर्जा शून्य होती है और इसलिए तंत्र की कुल ऊर्जा स्थितिज ऊर्जा के बराबर होती है। इसलिए तंत्र की कुल ऊर्जा,
$$ \begin{aligned} & =1 / 2\left(50 \mathrm{~N} \mathrm{~m}^{-1} \times 0.1 \mathrm{~m} \times 0.1 \mathrm{~m}\right) \ & =0.25 \mathrm{~J} \end{aligned} $$
जो 5 cm विस्थापन पर दो ऊर्जाओं के योग के समान है। यह ऊर्जा संरक्षण के सिद्धांत के अनुरूप है।
13.8 सरल लोलक
ऐसा कहा जाता है कि गैलीलियो ने एक चर्च में झूलते झाड़फ़ान की आवृत्ति को अपनी नब्ज की धड़कनों से मापा। उसने देखा कि झाड़फ़ान की गति आवर्ती थी। यह तंत्र एक प्रकार का लोलक है। आप भी एक टुकड़े को एक लंबे, अतानधारी धागे से बाँधकर अपना लोलक बना सकते हैं, लगभग 100 cm लंबा। अपने लोलक को किसी उपयुक्त सहारे से लटकाएँ ताकि यह दोलन करने के लिए स्वतंत्र हो। पत्थर को एक ओर थोड़ी दूरी से विस्थापित करके छोड़ दें। पत्थर आगे-पीछे गति करता है, यह लगभग दो सेकंड की अवधि के साथ आवर्ती होता है।

चित्र 13.17 (a) एक गोलक अपनी माध्य स्थिति के बारे में दोलन करता है। (b) अभिकेंद्री बल T-mg cosθ अभिकेंद्री बल प्रदान करता है लेकिन सहारे के बारे में कोई टॉर्क नहीं देता। स्पर्शरेखीय बल mg sinθ पुनःस्थापन टॉर्क प्रदान करता है।
हम दिखाएँगे कि माध्य स्थिति से छोटे विस्थापनों के लिए यह आवर्त गति सरल आवर्त है। सरल लोलक पर विचार करें—द्रव्यमान $m$ का एक छोटा बॉब एक अप्रसारणीय द्रव्यमानहीन डोरी से बँधा है जिसकी लंबाई $L$ है। डोरी का दूसरा सिरा एक कठोर आधार से जुड़ा है। बॉब आधार से गुजरने वाली ऊध्र्वाधर रेखा के परितः एक समतल में दोलन करता है। चित्र 13.17(a) यह प्रणाली दिखाता है। चित्र 13.17(b) सरल लोलक का एक प्रकार का ‘मुक्त-देह’ आरेख है जो बॉब पर कार्यरत बलों को दर्शाता है।
मान लीजिए $\theta$ वह कोण है जो डोरी ऊध्र्वाधर से बनाती है। जब बॉब माध्य स्थिति में होता है, $\theta=0$
बॉब पर केवल दो बल कार्यरत हैं; डोरी के अनुदान तनाव $\mathrm{T}$ और गुरुत्वाकर्षण के कारण ऊध्र्वाधर बल (=mg)। बल $m g$ को दो अवयवों में विघटित किया जा सकता है: डोरी के अनुदान $m g \cos \theta$ और उसके लंबवत् $m g \sin \theta$। चूँकि बॉब की गति लंबाई $L$ और केंद्र आधार बिंदु वाले वृत्त के अनुदान है, बॉब की एक अरीय त्वरण $\left(\omega^{2} L\right)$ है और एक स्पर्शीय त्वरण भी है; यह इसलिए उत्पन्न होता है क्योंकि वृत्त के चाप के अनुदान गति एकसमान नहीं है। अरीय त्वरण को निवल अरीय बल $\mathrm{T}-m g \cos \theta$ द्वारा प्रदान किया जाता है, जबकि स्पर्शीय त्वरण $m g \sin \theta$ द्वारा प्रदान किया जाता है। आधार के परितः टॉर्क के साथ कार्य करना अधिक सुविधाजनक है क्योंकि अरीय बल शून्य टॉर्क देता है। आधार के परितः टॉर्क $\tau$ पूरी तरह से बल के स्पर्शीय अवयव द्वारा प्रदान किया जाता है
$$ \begin{equation*} \tau=-L(m g \sin \theta) \tag{13.19} \end{equation*} $$
यह वह पुनःस्थापन बलाघूर्ण है जो कोणीय विस्थापन को कम करने की कोशिश करता है - इसलिए ऋण चिह्न है। घूर्णन गति के न्यूटन के नियम द्वारा,
$$ \begin{equation*} \tau=I \alpha \tag{13.20} \end{equation*} $$
जहाँ $I$ सहारे के बारे में तंत्र की जड़त्व आघूर्ण है और $\alpha$ कोणीय त्वरण है। इस प्रकार,
$$ \begin{equation*} I \alpha=-m g \sin \theta \quad L \tag{13.21} \end{equation*} $$
अथवा,
$$ \begin{equation*} \alpha=-\frac{m g L}{I} \sin \theta \tag{13.22} \end{equation*} $$
हम समीकरण (13.22) को सरल कर सकते हैं यदि हम यह मान लें कि विस्थापन $\theta$ छोटा है। हम जानते हैं कि $\sin \theta$ को इस प्रकार व्यक्त किया जा सकता है,
$$ \begin{equation*} \sin \theta=\theta-\frac{\theta^{3}}{3 !}+\frac{\theta^{5}}{5 !} \pm \ldots \tag{13.23} \end{equation*} $$
जहाँ $\theta$ रेडियन में है।
अब यदि $\theta$ छोटा है, तो $\sin \theta$ को $\theta$ द्वारा सन्निकटित किया जा सकता है और समीकरण (13.22) को तब इस प्रकार लिखा जा सकता है,
$$ \begin{equation*} \alpha=-\frac{m g L}{I} \theta \tag{13.24} \end{equation*} $$
तालिका 13.1 में, हमने कोण $\theta$ को डिग्री में, इसके समकक्ष रेडियन में, और फलन $\sin \theta$ का मान सूचीबद्ध किया है। इस तालिका से यह देखा जा सकता है कि 20 डिग्री तक के $\theta$ के लिए, $\sin \theta$ लगभग वही है जो रेडियन में व्यक्त $\theta$ है।
सारणी $13.1$ कोण $\theta$ के फलन के रूप में $\sin \theta$
| $\theta$ (डिग्री) | $\theta$ (रेडियन) | $\sin \theta$ |
|---|---|---|
| 0 | 0 | 0 |
| 5 | 0.087 | 0.087 |
| 10 | 0.174 | 0.174 |
| 15 | 0.262 | 0.259 |
| 20 | 0.349 | 0.342 |
समीकरण (13.24) गणितीय रूप से, समीकरण (13.11) के समान है, सिवाय इसके कि चर कोणीय विस्थापन है। इस प्रकार हमने सिद्ध किया है कि छोटे q के लिए, बॉब की गति सरल आवर्त है। समीकरणों (13.24) और (13.11) से,
$$ \omega=\sqrt{\frac{m g L}{I}} $$
और
$$ \begin{equation*} T=2 \pi \sqrt{\frac{I}{m g L}} \tag{13.25} \end{equation*} $$
अब चूँकि सरल लोलक की डोरी द्रव्यमानहीन है, जड़त्व आघूर्ण $I$ सरलता से $\mathrm{mL}^{2}$ है। समीकरण (13.25) तब सरल लोलक की आवर्तकाल के लिए प्रसिद्ध सूत्र देता है।
$$ \begin{equation*} T=2 \pi \sqrt{\frac{L}{g}} \tag{13.26} \end{equation*} $$
उदाहरण 13.8 एक सरल लोलक की लंबाई क्या है, जो सेकंड टिक करता है?
उत्तर समीकरण (13.26) से, एक सरल लोलक का आवर्तकाल दिया गया है,
$$ T=2 \pi \sqrt{\frac{L}{g}} $$
इस संबंध से एक प्राप्त करता है,
$$ L=\frac{g T^{2}}{4 \pi^{2}} $$
एक सरल लोलक का आवर्तकाल, जो सेकंड टिक करता है, $2 \mathrm{~s}$ है। इसलिए, $g=9.8 \mathrm{~m} \mathrm{~s}^{-2}$ और $T=2 \mathrm{~s}$ के लिए, $L$ है
$$ \begin{aligned} & =\frac{9.8\left(\mathrm{~m} \mathrm{~s}^{-2}\right) \times 4\left(\mathrm{~s}^{2}\right)}{4 \pi^{2}} \ & =1 \mathrm{~m} \end{aligned} $$
सारांश
1. वह गति जो स्वयं को दोहराती है, आवर्ती गति कहलाती है।
2. आवर्तकाल $T$ एक पूर्ण दोलन या चक्र के लिए आवश्यक समय है। यह आवृत्ति $v$ से इस प्रकार संबंधित है,
$$ T=\frac{1}{v} $$
आवर्ती या दोलन गति की आवृत्ति $v$ इकाई समय में होने वाले दोलनों की संख्या है। SI में इसे हर्ट्ज में मापा जाता है :
$$ 1 \text { हर्ट्ज }=1 \mathrm{~Hz}=1 \text { दोलन प्रति सेकंड }=1 \mathrm{~s}^{-1} $$
3. सरल आवर्त गति (SHM) में, साम्यावस्था से कण का विस्थापन $x(t)$ इस प्रकार दिया जाता है,
$$ x(t)=A \cos (\omega t+\phi) \quad \text { (विस्थापन) } $$
जिसमें $A$ विस्थापन का आयाम है, राशि $(\omega t+\phi)$ गति का कल है, और $\phi$ कल नियतांक है। कोणीय आवृत्ति $\omega$ गति के आवर्तकाल और आवृत्ति से इस प्रकार संबंधित है,
$$ \omega=\frac{2 \pi}{T}=2 \pi \nu \quad \text { (कोणीय आवृत्ति). } $$
4. सरल आवर्त गति को एकसमान वृत्तीय गति के उस व्यास पर प्रक्षेप के रूप में भी देखा जा सकता है जिस वृत्त में यह गति होती है।
5. SHM के दौरान कण का वेग और त्वरण समय के फलन के रूप में इस प्रकार दिए जाते हैं,
$$ \begin{array}{rlr} v(t) & =-\omega A \sin (\omega t+\phi) & \text { (वेग), } \\ \\ a(t) & =-\omega^{2} A \cos (\omega t+\phi) & \\ \\ & =-\omega^{2} x(t) & \text { (त्वरण), } \end{array} $$
इस प्रकार हम देखते हैं कि सरल आवर्त गति करते हुए पिण्ड का वेग तथा त्वरण दोनों आवर्ती फलन होते हैं, जिनके वेग आयाम $v_{m}=\omega A$ तथा त्वरण आयाम $a_{m}=\omega^{2} A$ क्रमशः होते हैं।
6. सरल आवर्त गति में कार्य करने वाला बल विस्थापन के समानुपाती होता है और सदैव गति के केन्द्र की ओर निर्देशित रहता है।
7. सरल आवर्त गति करता कोई कण किसी भी समय गतिज ऊर्जा $K=1 / 2 m v^{2}$ तथा स्थितिज ऊर्जा $U=1 / 2 \mathrm{kx}^{2}$ रखता है। यदि कोई घर्षण न हो तो निकाय की यांत्रिक ऊर्जा, $E=K+U$ सदैव नियत रहती है यद्यपि $K$ और $U$ समय के साथ बदलती हैं।
8. द्रव्यमान $m$ का एक कण, जो हुक के नियम के अनुसार प्रतिकारी बल $F=-k x$ के प्रभाव में दोलन करता है, निम्नलिखित के साथ सरल आवर्त गति प्रदर्शित करता है
$$ \begin{array}{ll} \omega=\sqrt{\frac{k}{m}} & \text { (कोणीय आवृत्ति) } \\ \\ T=2 \pi \sqrt{\frac{m}{k}} & \text { (आवर्तकाल) } \end{array} $$
इस प्रकार के निकाय को रेखीय दोलक भी कहा जाता है।
9. सरल लोलक का छोटे कोणों से दोलन करना लगभग सरल आवर्त गति होती है। दोलन का आवर्तकाल निम्नलिखित द्वारा दिया जाता है,
$$ T=2 \pi \sqrt{\frac{L}{g}} $$
| भौतिक राशि | प्रतीक | विमाएँ | इकाई | टिप्पणियाँ |
|---|---|---|---|---|
| आवर्तकाल | $T$ | $[\mathrm{~T}]$ | $\mathrm{s}$ | गति के पुनरावृत्त होने का न्यूनतम समय |
| आवृत्ति | $v(o r f)$ | $\left[\mathrm{T}^{-1}\right]$ | $\mathrm{s}^{-1}$ | $v=\frac{1}{T}$ |
| कोणीय आवृत्ति | $\omega$ | $\left[\mathrm{T}^{-1}\right]$ | $\mathrm{s}^{-1}$ | $\omega=2 \pi v$ |
| प्रावस्था नियतांक | $\phi$ | विमाहीन | rad | सरल आवर्त गति में विस्थापन की प्रावस्था का प्रारंभिक मान |
| बल नियतांक | $k$ | $\left[\mathrm{MT}^{-2}\right]$ | $\mathrm{N} \mathrm{m}^{-1}$ | सरल आवर्त गति $F=-k x$ |
विचार करने योग्य बिंदु
1. आवर्तकाल $T$ वह न्यूनतम समय है जिसके बाद गति पुनरावृत्त होती है। इस प्रकार, गति $n T$ के बाद पुनरावृत्त होती है, जहाँ $n$ एक पूर्णांक है।
2. प्रत्येक आवर्त गति सरल आवर्त गति नहीं होती। केवल वही आवर्त गति सरल आवर्त गति है जो बल नियम $F=-k x$ द्वारा नियंत्रित हो।
3. वृत्तीय गति व्युत्क्रम-वर्ग नियम बल के कारण (ग्रहीय गति की तरह) के साथ-साथ दो विमानों में सरल आवर्त बल के कारण भी उत्पन्न हो सकती है: $-m \omega^{2} r$। उत्तर स्थिति में, दो लंबवत दिशाओं ($x$ और $y$) में गति की प्रावस्थाओं में $\pi / 2$ का अंतर होना चाहिए। इस प्रकार, उदाहरण के लिए, एक कण जो बल $-m \omega^{2} r$ के अधीन है और जिसकी प्रारंभिक स्थिति $(0$, $A)$ और वेग $(\omega A, 0)$ है, त्रिज्या $A$ के वृत्त में एकसमान गति करेगा।
4. रेखीय सरल आवर्त गति के लिए एक दिए गए $\omega$ के साथ, गति को पूरी तरह निर्धारित करने के लिए दो प्रारंभिक परिस्थितियाँ आवश्यक और पर्याप्त होती हैं। प्रारंभिक परिस्थितियाँ हो सकती हैं: (i) प्रारंभिक स्थिति और प्रारंभिक वेग, या (ii) आयाम और प्रावस्था, या (iii) ऊर्जा और प्रावस्था।
5. उपरोक्त बिंदु 4 से, यदि आयाम या ऊर्जा दी गई हो, तो गति की प्रावस्था प्रारंभिक स्थिति या प्रारंभिक वेग द्वारा निर्धारित होती है।
6. दो सरल आवर्त गतियों का संयोजन, जिनमें स्वेच्छ आयाम और प्रावस्थाएँ हों, आवश्यक रूप से आवर्ती नहीं होता। यह तभी आवर्ती होता है जब एक गति की आवृत्ति दूसरी की आवृत्ति का पूर्णांक गुणज हो। हालाँकि, कोई भी आवर्ती गति हमेशा उपयुक्त आयामों वाली अनंत संख्या में आवर्त गतियों के योग के रूप में व्यक्त की जा सकती है।
7. सरल आवर्त गति की आवर्तकाल इसके आयाम, ऊर्जा या प्रावस्था स्थिरांक पर निर्भर नहीं करता। इसकी तुलना गुरुत्वाकर्षण के अंतर्गत ग्रहों की कक्षाओं की आवर्तकालों (केपलर का तृतीय नियम) से करें।
8. एक सरल लोलक की गति छोटी कोणीय विस्थापन के लिए सरल आवर्त होती है।
9. किसी कण की गति के सरल आवर्त होने के लिए, इसका विस्थापन $x$ निम्नलिखित किसी एक रूप में व्यक्त किया जाना चाहिए:
$$ \begin{aligned} & x=A \cos \omega t+B \sin \omega t \\ & x=A \cos (\omega t+\alpha), x=B \sin (\omega t+\beta) \end{aligned} $$
तीनों रूप पूरी तरह समतुल्य हैं (कोई भी एक रूप अन्य दो रूपों के पदों में व्यक्त किया जा सकता है)। इस प्रकार, दमित सरल आवर्त गति कड़ाई से सरल आवर्ती नहीं होती है। यह केवल लगभग सरल आवर्ती होती है, जब समय अंतराल $2 \mathrm{~m} / \mathrm{b}$ से बहुत कम हों, जहाँ $b$ दमन नियतांक है।



